← Back to Projects
Arena Battle Robot — Sensor Fusion & Embedded Control
2023 · University of Pennsylvania · Coursework Project
ESP32
C++
Sensor Fusion
Vive Tracker
ToF Sensor
PID Control
Motor Control
SolidWorks
Gallery

Overview
- Sensor Fusion & Localization: Integrated Vive tracking and ToF distance sensors to achieve real-time localization with ±3 cm accuracy for autonomous arena navigation.
- Embedded Control System: Programmed motor control and PID tuning on ESP32 using C++, enabling responsive maneuvering and stable closed-loop performance.
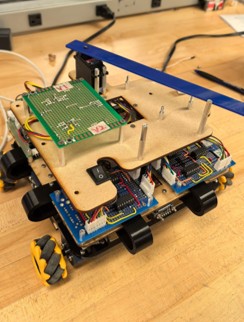
- Mechanical Design & Fabrication: Designed the full robot chassis and modular attacking arm in SolidWorks, then fabricated using CNC machining and 3D printing for lightweight durability.
- Hardware Integration: Assembled and prototyped electronic subsystems on a breadboard for motor drivers, power distribution, and sensor wiring validation.
Highlights
- Fused Vive + ToF sensors for precise real-time localization (±3 cm)
- Implemented PID motor control on ESP32 using C++
- Designed and fabricated a durable mechanical chassis + modular arm
- Built full prototype with breadboard-based control electronics
- Won 1st place / 30 teams for precision, speed, and control stability in the autonomous battle challenge.