← Back to Projects
Autonomous Maze-Solving Robot — Real-Time Sensing & Planning
2023 · University of Toronto · Coursework Project
Arduino
Python
A* Planning
Sensor Fusion
Ultrasonic
IR Line Trackers
Encoders
PID Control
Breadboard Prototyping
SolidWorks
3D Printing
Gallery

Overview
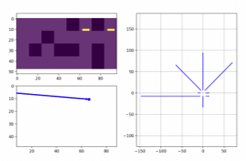
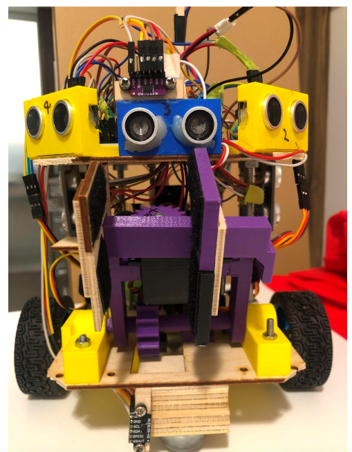
- Real-Time Sensing: Integrated 5 ultrasonic sensors, dual wheel encoders, and IR line trackers on an Arduino-based platform for continuous obstacle detection and localization.
- Planning & Control: Implemented A* path planning with waypoint tracking and PID velocity control for smooth, collision-free navigation in narrow corridors.
- Performance: Achieved < 2 cm positional error at 10 Hz update rate and a > 95% task completion rate across varied maze layouts.
- Hardware: Designed a compact chassis in SolidWorks, 3D-printed mounts, and breadboard-prototyped motor drivers and sensor harnesses for rapid iteration.
Highlights
- Multi-sensor fusion (ultrasonic + encoders + IR) at 10 Hz
- A* planner with waypoint tracking and PID velocity loop
- < 2 cm positional error; > 95% completion rate
- SolidWorks chassis, 3D-printed mounts, breadboard electronics