Projects
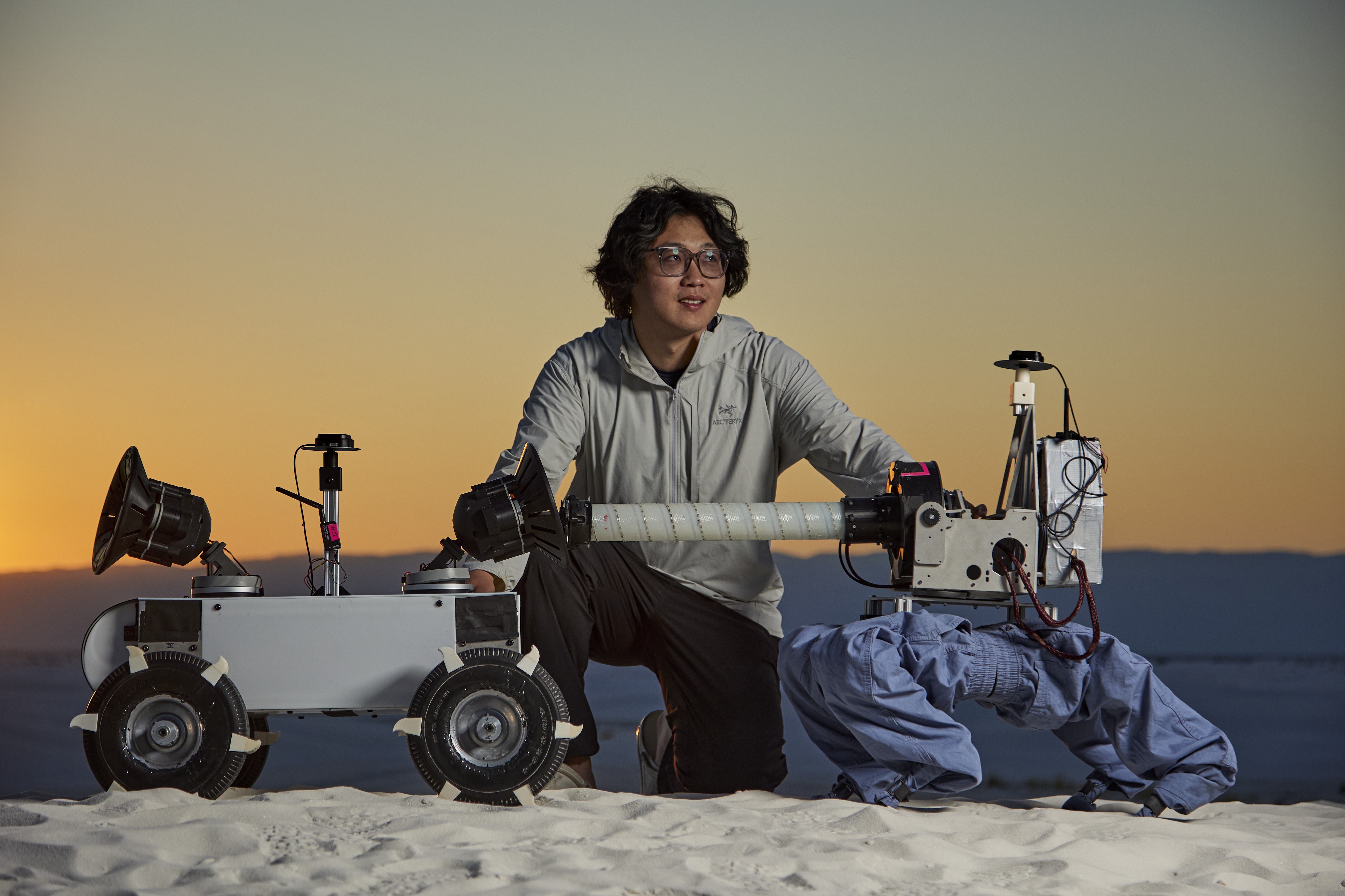
NASA LuSTR
Developed a multi-robot cooperative locomotion system with autonomous turret docking, integrated localization, and ROS2-based control for lunar rescue applications.
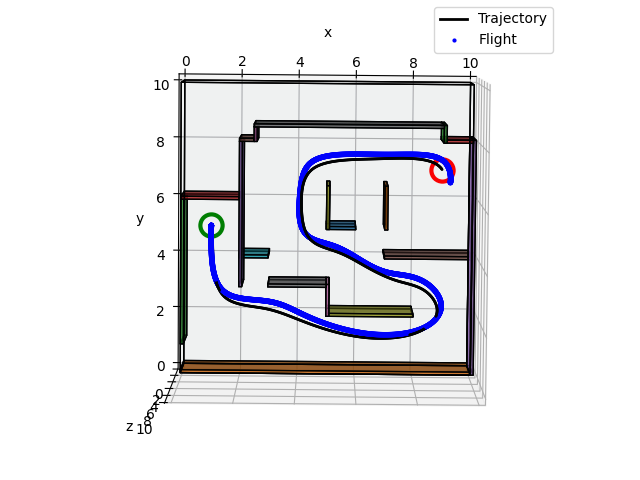
VIO-based Quadcopter
Implemented a ROS1 flight stack combining visual–inertial odometry, SE(3) trajectory planning, and closed-loop control for autonomous quadcopter navigation in cluttered environments.
Arena Battle Robot
Built and programmed a C++ controlled battle robot with real-time sensor feedback and actuators integration, winning 1st place out of 25 teams.
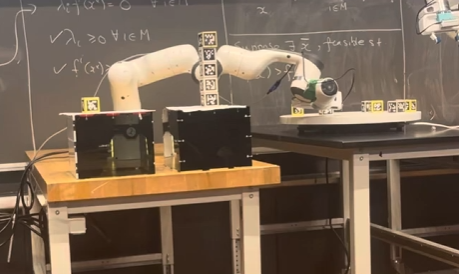
Franka Block Stacking Competition
Autonomous block stacking with the Franka Panda arm using ROS1-based motion planning and vision-guided manipulation.
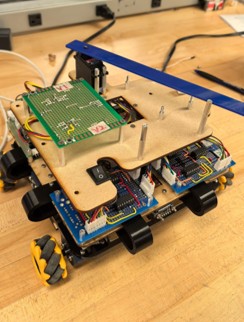
Maze Solving Robot
Designed a self-driving maze rover with custom sensor array, and Monte Carlo Localization, completing autonomous runs with centimeter-level accuracy.
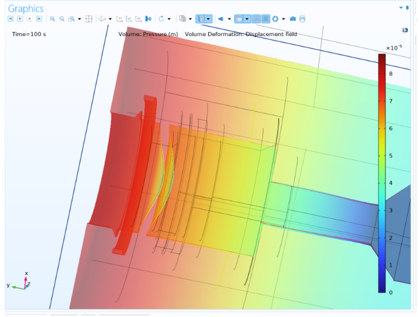
Optical Pressure Transducer
Modeled and improved an optical pressure transducer in COMSOL, enhancing stability and accuracy under thermal and fluid effects.
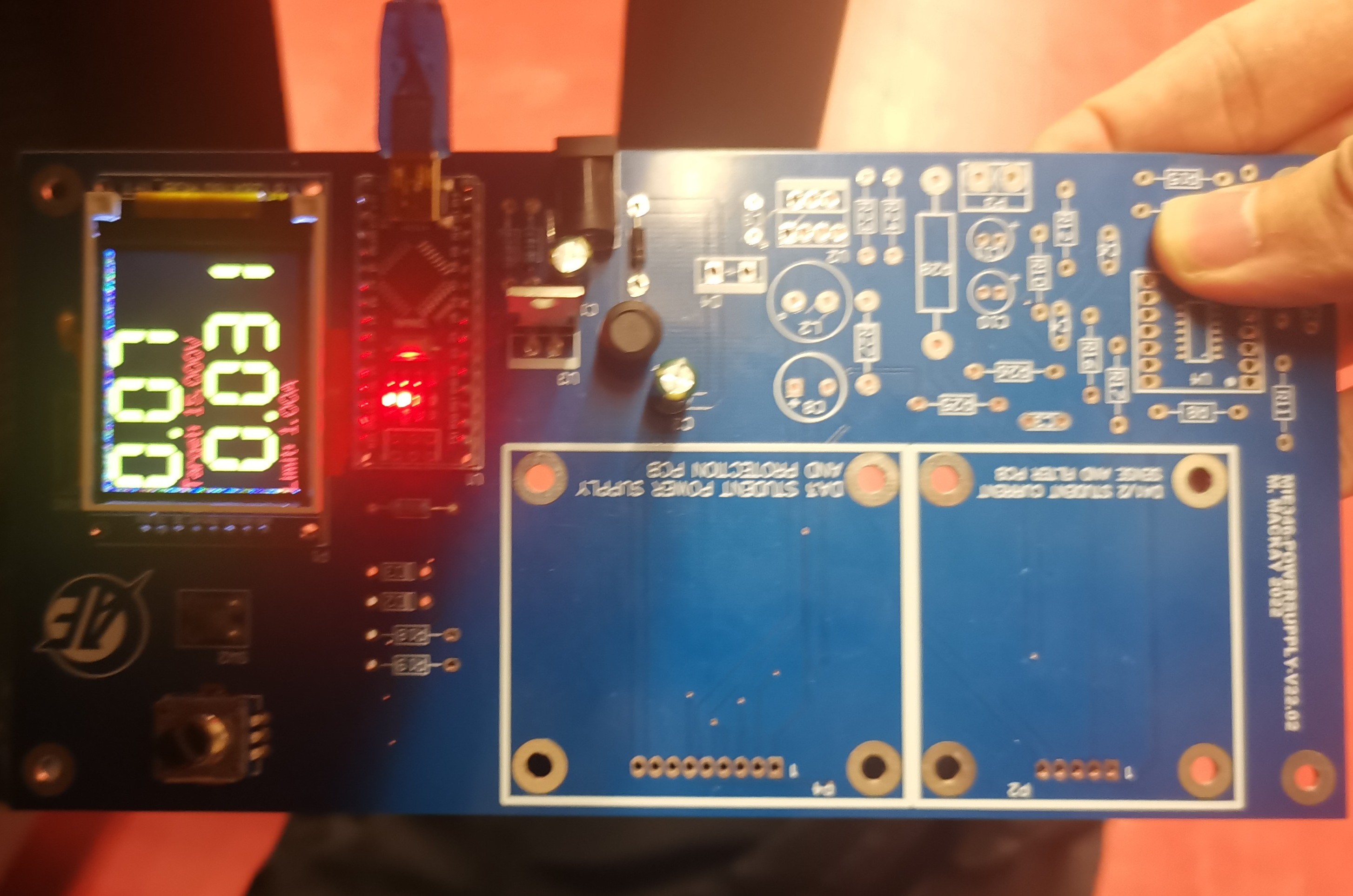
DIY Power Supply
Designed and built a DIY regulated DC power supply with adjustable voltage/current outputs for electronics prototyping。

Modular Keyboard
Built and customized a modular mechanical keyboard by manufacturing the hardware and adapting firmware for layout modifications。
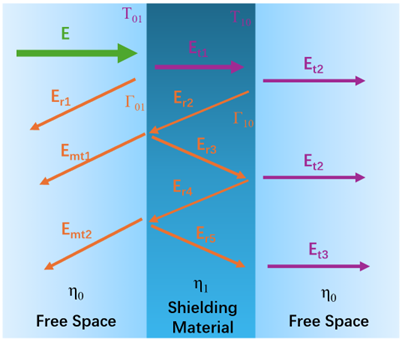
EMI Absorptive Shielding Material
Designed and validated CNT-based composite materials achieving optimal EMI absorption through fabrication and simulation.
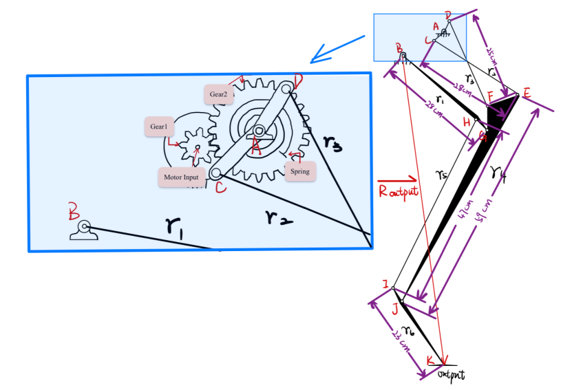
Jumping Robot
Simulated a jumping rescue robot principle with spring-loaded leg mechanisms, achieving 2 m jump feasibility through dynamic modeling and design improvements.