2026
NASA LASSIE: Multi-Robot Docking System (TRUSSES)
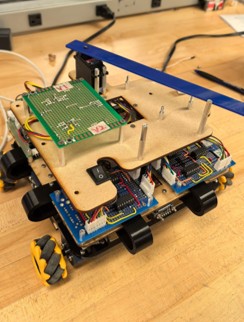
Developed a modular rover platform under NASA LASSIE project; implemented ROS2 coordination, AprilTag-based self-docking, and GPS-IMU localization with EKF fusion.

Hi, I’m
Robotics/Mechatronics Engineer
I’m a robotics engineer with hands-on experience in control algorithms, mechanical design, embedded systems, and software integration. My industry background in manufacturing and process optimization taught me to design to real engineering standards. I specialize in building reliable robotic systems from concept to control—bridging mechanical precision with intelligent automation.
Developed a modular rover platform under NASA LASSIE project; implemented ROS2 coordination, AprilTag-based self-docking, and GPS-IMU localization with EKF fusion.
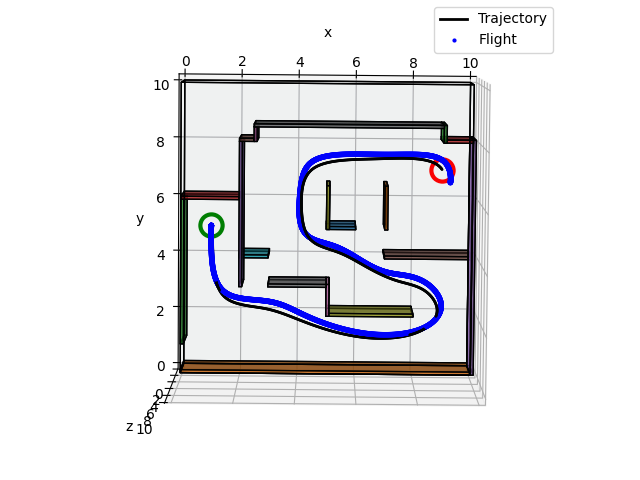
Built a ROS-based drone simulation integrating IMU and stereo vision for real-time state estimation and trajectory tracking; implemented VIO achieving <1% drift over 100 m flight.
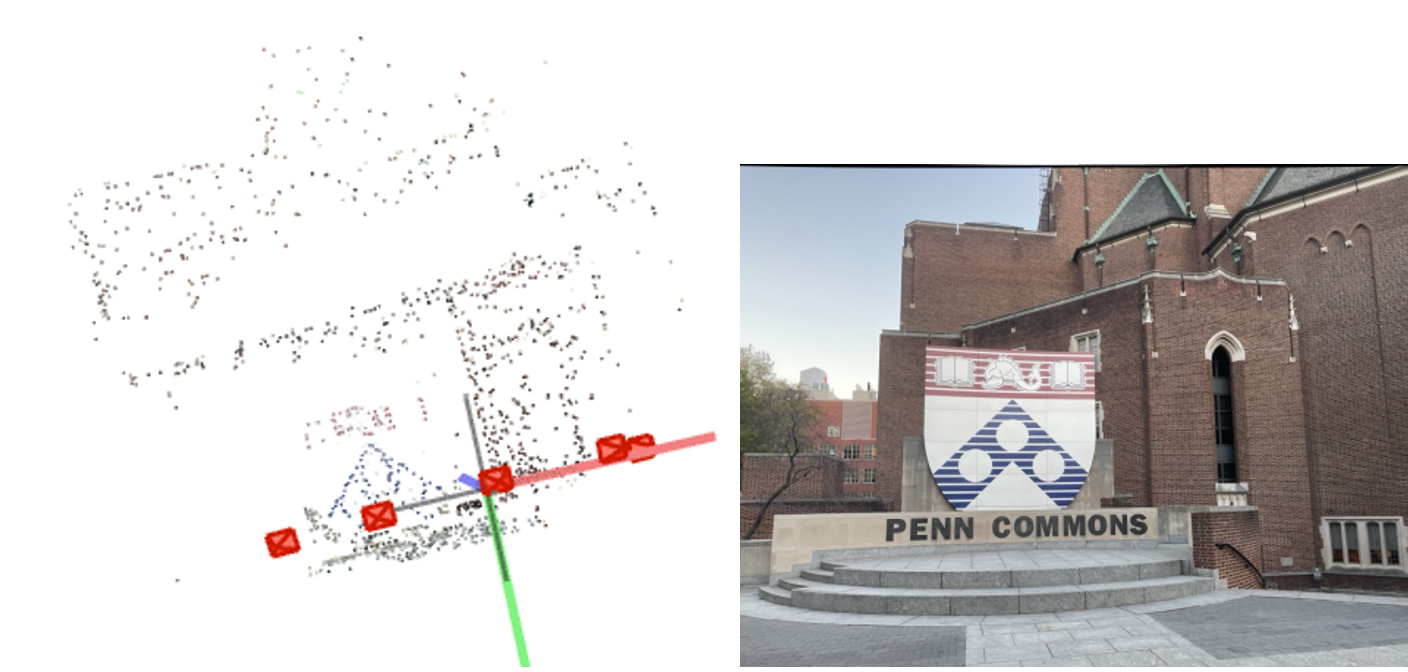
Built a multi-view 3D reconstruction pipeline with bundle adjustment and learned feature matching (LoFTR), enabling robust camera pose estimation and point cloud generation.
Designed and built a custom battle robot from scratch; fused Vive and ToF sensors for real-time localization, implemented motor control on ESP32 in C++, and prototyped circuits on breadboard.
Implemented inverse kinematics and Hybrid PF-based motion control in ROS; integrated camera vision for real-time grasp detection and pose alignment.
Developed a real-time embedded navigation system on Arduino using Python; integrated ultrasonic, encoder, and IR sensors with particle filter for localization and obstacle avoidance, and implemented A* for path planning.
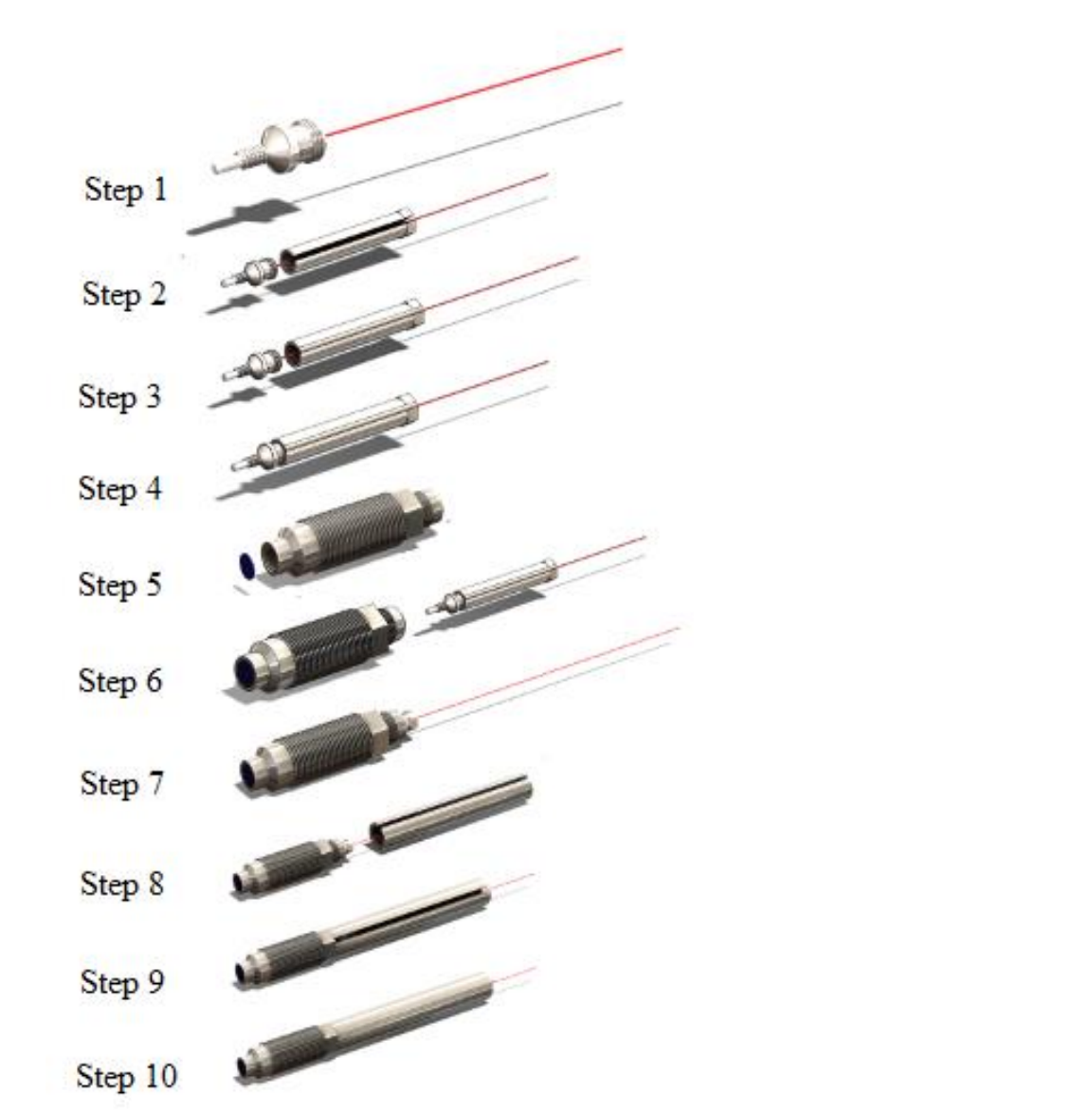
Designed and fabricated an optical pressure transducer using photodiode sensing and signal conditioning; implemented MATLAB-based real-time calibration and achieved ±2% measurement precision under 350 °C and 10,000 PSI test conditions.
Modified existing QMK-based keyboard firmware to add new macro and RGB control functions; fabricated and assembled the keyboard with custom key layout and casing.

Designed and fabricated a regulated DC power supply for laboratory and prototyping use, providing 0–15 V and 0–3 A adjustable outputs with <1% load regulation. Emphasized reliability and usability for testing sensors and microcontrollers.
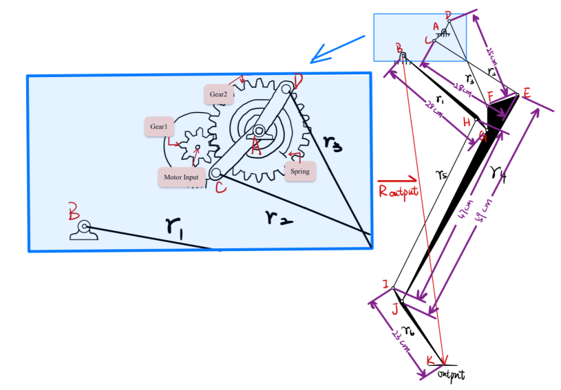
Designed a legged robot with modular spring mechanisms; simulated dynamics in MATLAB and achieved ~2 m vertical jumps in tests.